La Coordinación de Electrónica, desarrolló una herramienta para que la Coordinación de Geotecnia pueda realizar pruebas triaxiales en condiciones anisotrópicas, condición de distribución de esfuerzos más cercanas a las que se encuentra el suelo en sitio.
Conocer las propiedades mecánicas del suelo es muy importante para el gremio de la Ingeniería Civil, pues a partir de los parámetros mecánicos que se determinan, se puede definir el comportamiento esfuerzo-deformación del suelo, así como el ángulo de fricción interna del mismo, información necesaria para el diseño de las estructuras que se desplantarán sobre éste.
Con el fin de comprender el comportamiento del suelo se han diseñado una gran variedad de ensayes, tanto de campo como de laboratorio siendo estos últimos los más solicitados ya que son más económicos y fáciles de controlar en comparación con los de campo.
Las pruebas triaxiales son los ensayos de laboratorio que permiten someter al suelo a condiciones de esfuerzo similares a las que se tienen en campo y luego incrementar el esfuerzo axial hasta llevarlo a la falla y a partir de la información generada determinar los parámetros mecánicos del suelo. La forma más común de realizar este tipo de ensayes es bajo condiciones de confinamiento isótropo de la muestra, aunque sabemos que en campo ésta es anisótropa. El proyecto que se generó fue automatizar un equipo que inicialmente operaba en estas condiciones para poder someter a la muestra a una condición de esfuerzos anisótropos, previos a llevarla a la falla.
Aunque una prueba anisotrópica, en concepto es fácil, no lo es en la práctica pues se requiere que los esfuerzos laterales con respecto al axial sean diferentes, pero de acuerdo con la relación prefijada y, que ésta se mantenga al incrementar el esfuerzo axial, se deben tomar en cuenta los cambios dimensionales sufridos por la muestra durante las diferentes etapas del ensaye; además, el equipo debe permitir cambiar el modo de operación de carga a desplazamiento controlado y viceversa, de acuerdo con los requerimientos de la etapa en la que se encuentre el ensaye.
Independientemente de la complejidad del control, se requiere que el sistema esté completamente instrumentado, así como tener los actuadores correspondientes, a fin de lograr el control requerido de las diferentes variables, lo cual hace que estos equipos no sean comerciales.
El objetivo del trabajo fue desarrollar un equipo que pudiera realizar una consolidación anisotrópica utilizando la mayor parte de los recursos ya existentes, buscando minimizar los costos, así como una estandarización del hardware y software en las diferentes cámaras triaxiales del laboratorio, esto último permitió minimizar los inventarios en refacciones, así como los tiempos de desarrollo.
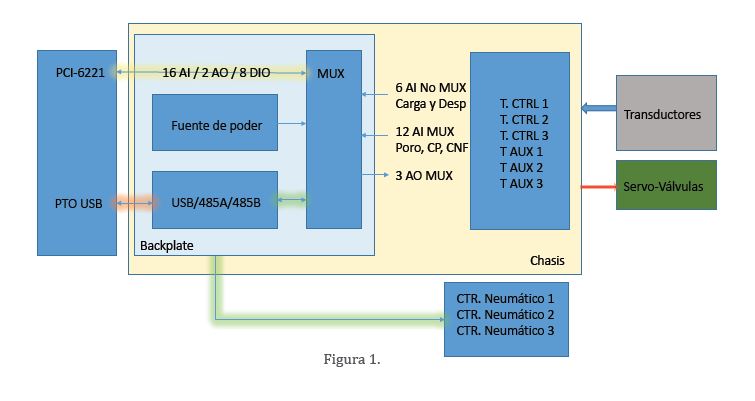
Estructura del hardware: Como sistema de adquisición de datos se decidió utilizar una tarjeta de la serie PCI-6221 que integra un sistema de 16 canales analógicos con dos salidas analógicas, ambos de alta velocidad y un conjunto de 24 líneas digitales que incluyen contadores y puertos generales, que para este caso estos últimos no son relevantes.
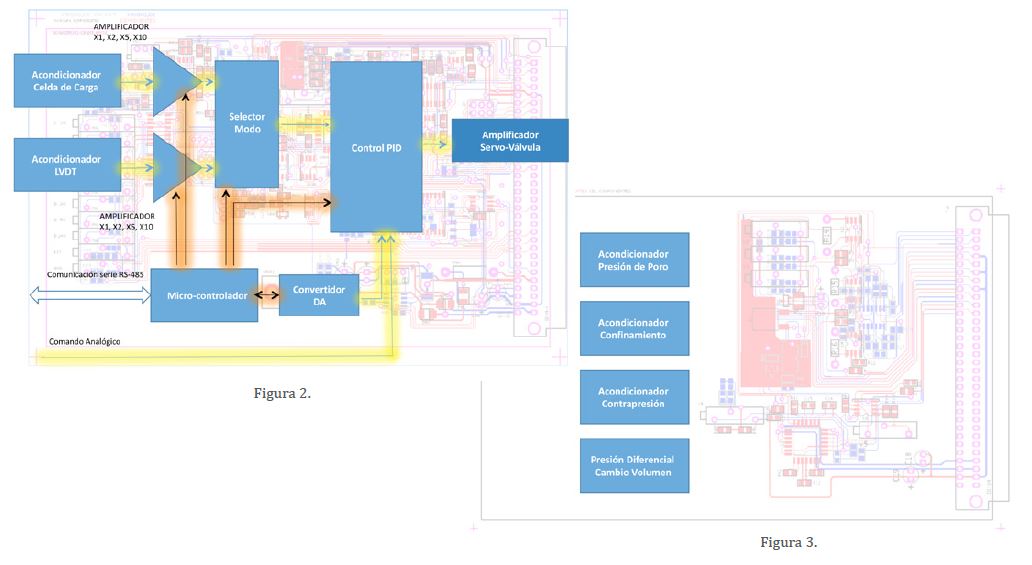
La tarjeta es lo único que se compra a un tercero porque toda la electrónica necesaria para el acondicionamiento de las señales de todos los transductores así como de la servoválvula neumática fue diseñada y construida en la coordinación. Se definieron dos modelos de tarjetas y dos para cada cámara con funciones especiales, la primera tarjeta se llamó servo (figura 2) mientras que la segunda se denominó de transductores (figura 3). La tarjeta servo que realiza el servo control contiene un acondicionador para una celda de carga (fuerza) y un acondicionador para un LVDT (desplazamiento) cada uno con cuatro intervalos (100, 50, 20 y 10%) programables de manera digital.
La señal analógica de ambos acondicionadores se tiene disponible para la tarjeta de adquisición de datos, así como para el módulo de servo control el cual de manera digital determina el origen de la retroalimentación y por ende el de operación; la salida de este módulo se inyecta al amplificador de la servo válvula que consiste en un amplificador de transconductancia con una salida de ± 200 mA para una entrada de ±10V. Esta tarjeta cuenta con un puerto RS-485 para recibir los comandos que determinan la operación del equipo quedando entendido que aunque las tarjetas son igual al conectarse al gabinete ésta toma una dirección y canal en particular.
La tarjeta de transductores simplemente acondiciona las señales de tres transductores de presión, Confinamiento, Contrapresión y Presión de Poro, así como la del transductor de cambio de volumen, el cual está formado por un sensor de presión diferencial inductivo en conjunto con un grupo de buretas donde el volumen se obtiene por la relación de los cambios de presión y alturas de columnas.
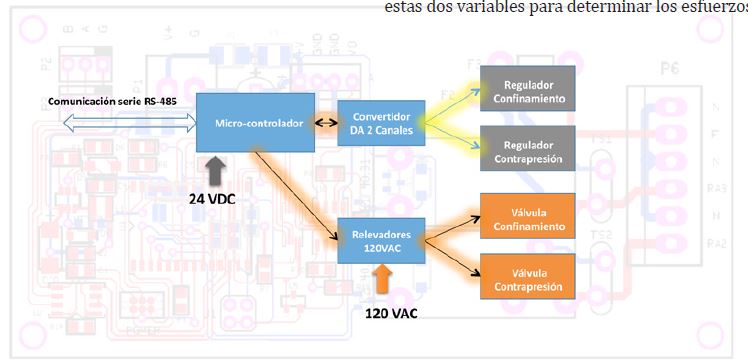
Dado que para la ejecución de una prueba anisotrópica se requiere de controlar de manera continua la presión de confinamiento, la contrapresión y un par de válvulas encendido apagado, se utilizaron un par de reguladores electrónicos de presión de alta precisión con entrada analógica así como un par de válvulas encendido-apagado por lo que se requirió introducir un módulo el cual permitiera controlar dos reguladores además de las dos válvulas y como las variables son relativamente lentas se usó una comunicación serial en formato RS-485, de tal suerte que se pueden encadenar hasta cuatro de estas tarjetas por lo que a cada una de ellas se le puede fijar una dirección y estas responden a la dirección prefijada. La figura 4 muestra la estructura básica del módulo.
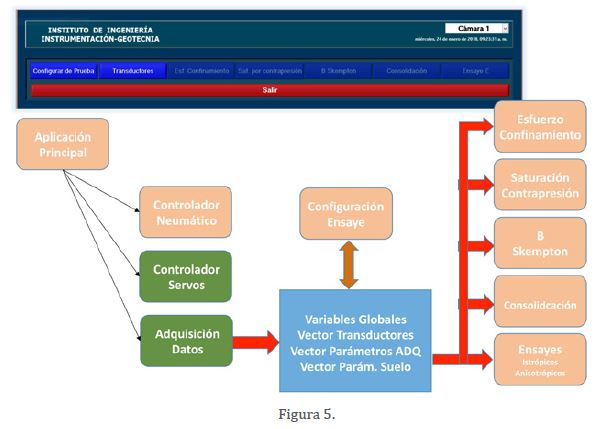
Aplicación: La aplicación se realizó en LabView que es un lenguaje de programación gráfico y permite desarrollar estructuras modulares. Buena parte de las rutinas o módulos ya se tenían desarrollados y probados de manera exhaustiva en otros equipos del laboratorio de Geotecnia y se buscó que para el usuario la operación del programa fuera similar al de los otros equipos. Pero a diferencia de los otros equipos, en esta ocasión la rutina principal, además de lanzar la rutina de adquisición de datos, lanza las rutinas del servo-controladores y la del control neumático, esenciales para la operación anisotrópica. La figura 5 muestra la relación que guardan las diferentes rutinas.
 Para lograr que en función de los parámetros definidos por el investigador se puedan cambiar los esfuerzos laterales de confinamiento, en función de la carga aplicada pero tomando en cuenta los cambios dimensionales sufridos por la muestra a lo largo y durante las diferentes etapas del ensaye, implica llevar un histórico del estado de la probeta desde que se monta hasta que termina el ensaye, esto se realiza al considerar la longitud y área después del labrado de datos que deben ser ingresados de forma manual, y con la información de los transductores se obtiene en cualquier momento los cambios de estas dos variables para determinar los esfuerzos verdaderos.
Para lograr que en función de los parámetros definidos por el investigador se puedan cambiar los esfuerzos laterales de confinamiento, en función de la carga aplicada pero tomando en cuenta los cambios dimensionales sufridos por la muestra a lo largo y durante las diferentes etapas del ensaye, implica llevar un histórico del estado de la probeta desde que se monta hasta que termina el ensaye, esto se realiza al considerar la longitud y área después del labrado de datos que deben ser ingresados de forma manual, y con la información de los transductores se obtiene en cualquier momento los cambios de estas dos variables para determinar los esfuerzos verdaderos.
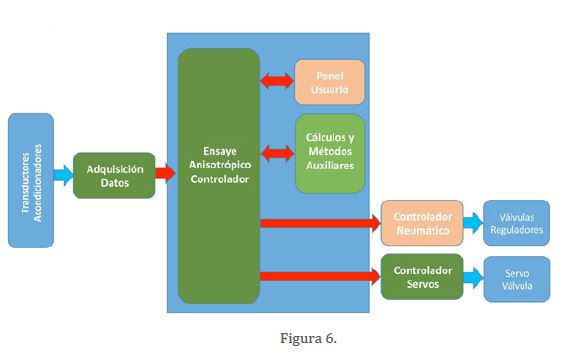
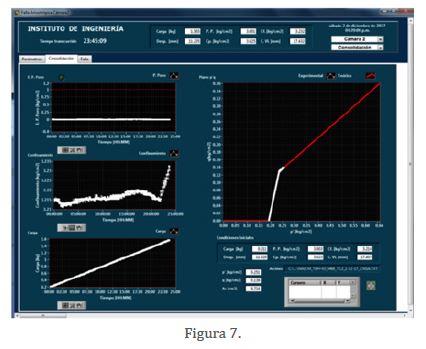
El ensaye anisotrópico cuenta con un panel de usuario en el cual el operador configura, pre visualiza el ensayo y visualiza los resultados experimentales durante el ensayo. Se buscó que todos los módulos de cálculo para el control fueran rutinas independientes a fin de facilitar la revisión y las futuras mejoras del sistema. Así el programa, con la información de los transductores y los valores objetivos previamente programados, calcula y comanda el controlador neumático y el servo-controlador para obtener las trayectorias de esfuerzos deseados. La figura 6 muestra un esquema de cómo interactúan las diferentes rutinas. Mientras que la figura 7 muestra la operación de este modo de operación.
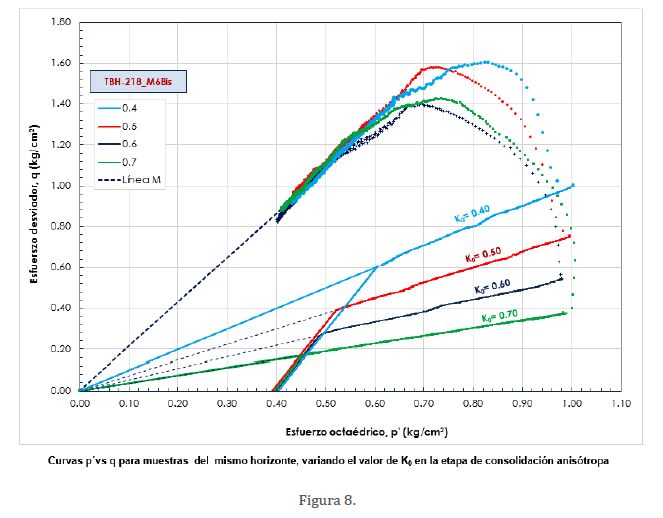
En la figura 8 se muestran resultados de validación del equipo, finalmente, la TX Anisotrópica es muy útil para el estudio de suelo y es una herramienta que no la hay en el mercado.